在路径规划方面,迷宫搜索是验证图遍历算法的标准场景,这里将简单介绍一下四种核心算法:深度优先搜索(DFS)、广度优先搜索(BFS)、Dijkstra 算法以及 A* 算法的原理以及C++的实现。
在无权图即迷宫各路径代价相等中,DFS和BFS是两种最基本的策略。
一、迷宫的定义
1.基础常量与数据结构
迷宫的每个节点有 4 个移动方向,先定义核心常量:
#include <iostream>
#include <stack>
// 迷宫每个节点的4个方向
const int RIGHT = 0;
const int DOWN = 1;
const int LEFT = 2;
const int UP = 3;
// 迷宫每个节点方向的数量
const int WAY_NUM = 4;
// 节点的行走状态
const int YES = 4;
const int NO = 5;
// 迷宫节点信息
struct Node
{
int x;
int y;
int val;
int state[WAY_NUM];
};2. 迷宫基础模型
迷宫类定义如下:
#include <iostream>
#include <stack>
class Maze
{
public:
Maze(int _col, int _row) : col(_col), row(_row)
{
pMaze = new Node *[row];
for (size_t i = 0; i < row; i++)
{
pMaze[i] = new Node[col];
}
}
// 析构函数:释放内存
~Maze() {
for (size_t i = 0; i < row; i++) {
delete[] pMaze[i];
}
delete[] pMaze;
}
void initNode(int x, int y, int val)
{
pMaze[x][y].x = x;
pMaze[x][y].y = y;
pMaze[x][y].val = val;
for (int i = 0; i < WAY_NUM; ++i)
{
pMaze[x][y].state[i] = NO;
}
}
// 初始化迷宫0节点四个方向的行走状态信息
void setNodeState()
{
for (int i = 0; i < row; ++i)
{
for (int j = 0; j < col; ++j)
{
if (pMaze[i][j].val == 1)
{
continue;
}
// 当前节点的右边,值如果是0,表示可以走
// 右:判断列不越界且右侧节点可走
if (j < col - 1 && pMaze[i][j + 1].val == 0)
{
pMaze[i][j].state[RIGHT] = YES;
}
// 下:判断行不越界且下侧节点可走
if (i < row - 1 && pMaze[i + 1][j].val == 0)
{
pMaze[i][j].state[DOWN] = YES;
}
// 左:判断列不越界且左侧节点可走
if (j > 0 && pMaze[i][j - 1].val == 0)
{
pMaze[i][j].state[LEFT] = YES;
}
// 上:判断行不越界且上侧节点可走
if (i > 0 && pMaze[i - 1][j].val == 0)
{
pMaze[i][j].state[UP] = YES;
}
}
}
}
private:
int col; // 列数
int row; // 行数
Node **pMaze; // 迷宫二维数组
std::stack<Node> stack; // 保存DFS路径的栈
};以 6×6 迷宫为例,迷宫定义如下:
0 0 1 1 1 1
1 0 0 0 0 1
1 0 1 1 0 1
1 0 0 0 0 1
1 0 1 1 1 1
1 0 0 0 0 00表示通路,1表示墙壁,迷宫入口为 (0,0),迷宫出口为:(5,5)。
二、深度优先搜索
深度优先搜索(Depth First Search,DFS)优先访问节点的后继节点。在迷宫中,它沿着一条路径持续推进,直到遇到障碍或者边界,随后通过回溯,返回上一个分叉点。其实现方式是使用递归或栈。
#include <iostream>
#include <stack>
class Maze
{
public:
Maze(int _col, int _row) : col(_col), row(_row)
{
//同上,略
}
void initNode(int x, int y, int val)
{
//同上,略
}
// 初始化迷宫0节点四个方向的行走状态信息
void setNodeState()
{
//同上,略
}
void searchMazePath()
{
// 没有入口,直接return
if (pMaze[0][0].val == 1)
{
return;
}
stack.push(pMaze[0][0]);
while (!stack.empty())
{
Node top = stack.top();
int x = top.x;
int y = top.y;
// 已经找到了右下角的迷宫出口
if (x == row - 1 && y == col - 1)
{
return;
}
// 先往右找
if (pMaze[x][y].state[RIGHT] == YES)
{
pMaze[x][y].state[RIGHT] = NO;
pMaze[x][y + 1].state[LEFT] = NO;
stack.push(pMaze[x][y + 1]); // 如果右边能走,就入栈
continue; // 回到开头,重新去上面入栈的右边,继续判断
}
// 如果右边走不了,就往下
if (pMaze[x][y].state[DOWN] == YES)
{
pMaze[x][y].state[DOWN] = NO;
pMaze[x + 1][y].state[UP] = NO;
stack.push(pMaze[x + 1][y]);
continue;
}
// 往左查找
if (pMaze[x][y].state[LEFT] == YES)
{
pMaze[x][y].state[LEFT] = NO;
pMaze[x][y - 1].state[RIGHT] = NO;
stack.push(pMaze[x][y - 1]);
continue;
}
// 往上查找
if (pMaze[x][y].state[UP] == YES)
{
pMaze[x][y].state[UP] = NO;
pMaze[x - 1][y].state[DOWN] = NO;
stack.push(pMaze[x - 1][y]);
continue;
}
// 如果4个方向都不能走,说明栈顶元素节点没有方向可走,出栈
stack.pop();
}
}
void showMazePath()
{
if (stack.empty())
{
std::cout << "不存在一条迷宫路径" << std::endl;
}
else
{
std::cout << "-------迷宫路径-------" << std::endl;
while (!stack.empty())
{
Node top = stack.top();
pMaze[top.x][top.y].val = '*';
stack.pop();
}
for (int i = 0; i < row; ++i)
{
for (int j = 0; j < col; j++)
{
if (pMaze[i][j].val == '*')
{
std::cout << "* ";
}
else
{
std::cout << pMaze[i][j].val << " ";
}
}
std::cout << std::endl;
}
}
}
private:
// 迷宫节点信息
struct Node
{
int x;
int y;
int val;
int state[WAY_NUM];
};
int col;
int row;
Node **pMaze; // 动态生成迷宫
std::stack<Node> stack; // 辅助生成深度优先查找到的迷宫的路径
};
上述代码的核心逻辑:
- 栈的作用:栈用于保存当前行走的路径,栈顶始终是当前所在的节点。
- 方向优先级:代码中按 "右→下→左→上" 的顺序尝试,DFS 会优先沿着一个方向走到底。
- 回溯机制:当当前节点四个方向都走不通时,执行pop()出栈,回到上一个节点继续尝试其他方向。
- 防回头标记:将走过的路径双向标记为不可走(如向右走后,当前节点的 RIGHT 和右侧节点的 LEFT 都设为 false),避免重复走同一路径。
调用方法如下:
int main()
{
cout << "请输入迷宫的行列数,例如:10 10:";
int row, col, data;
cin >> row >> col;
Maze maze(row, col); //
cout << "请输入迷宫的路径信息(0表示可以走,1表示不能走)" << endl;
for (size_t i = 0; i < row; ++i)
{
for (size_t j = 0; j < col; ++j)
{
cin >> data;
maze.initNode(i, j, data);
}
}
maze.setNodeState();
maze.searchMazePath();
maze.showMazePath();
cout << endl;
return 1;
}运行:
请输入迷宫的行列数,例如:10 10
5 5
请输入迷宫的路径信息:0表示可以走,1表示不能走
0 0 0 1 1
1 0 0 0 1
1 1 0 1 1
1 1 0 0 1
1 1 1 0 0
-------迷宫路径-------
* * * 1 1
1 0 * 0 1
1 1 * 1 1
1 1 * * 1
1 1 1 * *再次运行一个不通的迷宫:
请输入迷宫的行列数,例如:10 10
5 5
请输入迷宫的路径信息:0表示可以走,1表示不能走
0 0 0 1 1
1 0 1 0 1
1 1 0 1 1
1 1 0 0 1
1 1 1 0 0
不存在一条迷宫路径DFS会一直沿着预定的方向探测,比如上面探测方向的顺序是 右-下-左-上,如果其中右边一直能走,它会一直往右走,如果下边能走,就一直往下走,直到到达终点。
比如:
请输入迷宫的行列数,例如:10 10
6 6
请输入迷宫的路径信息:0表示可以走,1表示不能走
0 0 1 1 1 1
1 0 0 0 0 1
1 0 1 1 0 1
1 0 0 0 0 1
1 0 1 1 1 1
1 0 0 0 0 0
-------迷宫路径-------
* * 1 1 1 1
1 * * * * 1
1 0 1 1 * 1
1 * * * * 1
1 * 1 1 1 1
1 * * * * * 显然,这不是最优路线。
三、广度优先搜索
广度优先搜索(Breadth First Search,BFS)则不同,它会"层层推进",先探索当前位置的所有相邻节点,再探索下一层节点,即BFS会按距离起点的步数分层扩展,它首先访问所有距离为 1 的节点,随后是距离为 2 的节点。
广度优先使用层层扩展的方式,依赖一个队列结构,在无权图中,BFS 首次到达终点的路径即为最短路径。其空间复杂度较高为 O(V),需存储所有已访问节点。
实现代码如下:
#include <iostream>
#include <mutex>
#include <string>
#include <memory>
#include <queue>
#include <vector>
using namespace std;
class Maze
{
public:
Maze(int c, int r) : col(c), row(r)
{
pMaze = new Node *[row];
for (size_t i = 0; i < row; ++i)
{
pMaze[i] = new Node[col];
}
path.resize(row * col);
}
// 析构函数:释放内存
~Maze() {
// 同上
}
void initNode(int x, int y, int val)
{
//同上
}
// 观察当前节点的上下走有四个方向的元素是否可以走,如果可以,修改状态。
void setNodeState()
{
//同上
}
void searchMazePath()
{
if (pMaze[0][0].val == 1)
{
return;
}
queue.push(pMaze[0][0]);
while (!queue.empty())
{
Node top = queue.front();
int x = top.x;
int y = top.y;
// 已经找到右下角,得到迷宫路径
if (x == row - 1 && y == col - 1)
{
return;
}
// 如果往右可以走
if (pMaze[x][y].state[RIGHT])
{
pMaze[x][y].state[RIGHT] = false;
pMaze[x][y + 1].state[LEFT] = false; // 只走一遍
path[x * row + y + 1] = pMaze[x][y]; // 记录前驱节点(用于回溯路径)
queue.push(pMaze[x][y + 1]);
if (check(pMaze[x][y + 1]))
{
return;
}
}
// 如果往下可以走
if (pMaze[x][y].state[DOWN])
{
pMaze[x][y].state[DOWN] = false;
pMaze[x + 1][y].state[UP] = false; // 只走一遍
path[(x + 1) * row + y] = pMaze[x][y];
queue.push(pMaze[x + 1][y]);
if (check(pMaze[x + 1][y]))
{
return;
}
}
// 如果往左可以走
if (pMaze[x][y].state[LEFT])
{
pMaze[x][y].state[LEFT] = false;
pMaze[x][y - 1].state[RIGHT] = false; // 只走一遍
path[x * row + y - 1] = pMaze[x][y];
queue.push(pMaze[x][y - 1]);
if (check(pMaze[x][y - 1]))
{
return;
}
}
// 如果往上可以走
if (pMaze[x][y].state[UP])
{
pMaze[x][y].state[UP] = false;
pMaze[x - 1][y].state[DOWN] = false; // 只走一遍
path[(x - 1) * row + y] = pMaze[x][y];
queue.push(pMaze[x - 1][y]);
if (check(pMaze[x - 1][y]))
{
return;
}
}
queue.pop();
}
}
void showMazePath()
{
if (queue.empty())
{
cout << "不存在一条迷宫路径" << endl;
}
else
{
int x = row - 1;
int y = col - 1;
for (;;)
{
pMaze[x][y].val = '*';
if (x == 0 && y == 0)
{
break;
}
Node node = path[x * row + y];
x = node.x;
y = node.y;
}
for (size_t i = 0; i < row; ++i)
{
for (size_t j = 0; j < col; ++j)
{
if (pMaze[i][j].val == '*')
{
cout << "* ";
}
else
{
cout << pMaze[i][j].val << " ";
}
}
cout << endl;
}
}
}
private:
struct Node
{
int x;
int y;
int val;
bool state[WAY_NUM]; // 节点的前后左右4个方向是否可以走
};
bool check(Node &node)
{
return node.x == row - 1 && node.y == col - 1;
}
int row;
int col;
Node **pMaze;
queue<Node> queue; // bfs依赖的队列结构
vector<Node> path; // 记录bfs时,节点的行走信息
};上述代码的核心逻辑为:
- 队列的作用:队列用于保存待探索的节点,队首是当前处理的节点,处理完后出队,再将其所有可走的相邻节点入队。
- 前驱节点记录:path数组保存每个节点的上一个节点(前驱),用于找到出口后回溯完整路径。
- 层级扩展:BFS 会先处理完当前层的所有节点(同一距离的节点),再处理下一层,因此能保证找到最短路径。
- 终止条件:只要发现某个节点是出口,立即返回,因为 BFS 的第一个出口路径就是最短路径。
调用方法如下:
int main()
{
cout << "请输入迷宫的行列数,例如:10 10:";
int row, col, data;
cin >> row >> col;
Maze maze(row, col); //
cout << "请输入迷宫的路径信息(0表示可以走,1表示不能走)" << endl;
for (size_t i = 0; i < row; ++i)
{
for (size_t j = 0; j < col; ++j)
{
cin >> data;
maze.initNode(i, j, data);
}
}
cout << "======================" << endl;
maze.setNodeState();
maze.searchMazePath();
maze.showMazePath();
cout << endl;
return 1;
}运行:
请输入迷宫的行列数,例如:10 10:6 6
请输入迷宫的路径信息(0表示可以走,1表示不能走)
0 0 1 1 1 1
1 0 0 0 0 1
1 0 1 1 0 1
1 0 0 0 0 1
1 0 1 1 1 1
1 0 0 0 0 0
======================
* * 1 1 1 1
1 * 0 0 0 1
1 * 1 1 0 1
1 * 0 0 0 1
1 * 1 1 1 1
1 * * * * * 请输入迷宫的行列数,例如:10 10:6 6
请输入迷宫的路径信息(0表示可以走,1表示不能走)
0 0 1 1 1 1
1 0 0 0 0 1
1 0 1 1 0 1
1 0 0 0 0 1
1 1 1 1 0 1
1 0 0 0 0 0
======================
* * 1 1 1 1
1 * 0 0 0 1
1 * 1 1 0 1
1 * * * * 1
1 1 1 1 * 1
1 0 0 0 * * 四、Dijkstra 算法
上述不管是DFS还是BFS,都是无权图即路径中每一步的代价都是相等的。DFS可以用来判断连通性,BFS可以用来解决每一步代价相同迷宫即无权图的最短路径。而Dijkstra算法可以认为是BFS的升级版,它可以解决 每一步代价 / 权重不一样 的即带权图最短路径问题(比如迷宫里有的路难走,代价是 2、3、5...)。
在实现上,由于每一步的权重不一样,所以队列结构方面不能再使用BFS中的普通的先进先出队列,而要使用优先级队列中的小根堆。可以认为BFS算法是Dijkstra算法再所有边权重=1时的特列,Dijkstra是带权图的“高级BFS”。
为了表示权重,需要在原有的Node节点上增加权重字段,并且需要提供一个函数对象及仿函数(Function Object)用来方便优先队列即小根堆来使用,以方便代价小的对象先出。
struct Node
{
int x;
int y;
int val; // 0=路 1=墙 * =路径
int cost; // 代价权重
};
struct Compare
{
bool operator()(const Node &a, const Node &b)
{
return a.cost > b.cost; // 小根堆
}
};算法的代码实现如下:
#include <iostream>
#include <mutex>
#include <string>
#include <memory>
#include <queue>
#include <vector>
using namespace std;
const int RIGHT = 0;
const int DOWN = 1;
const int LEFT = 2;
const int UP = 3;
const int WAY_NUM = 4;
/*
0 0 1 1 1 1
1 0 0 0 0 1
1 0 1 1 0 1
1 0 0 0 0 1
1 0 1 1 1 1
1 0 0 0 0 0
0 0 1 1 1 1
1 0 0 0 0 1
1 0 1 1 0 1
1 0 0 0 0 1
1 1 1 1 0 1
1 0 0 0 0 0
0 1 1 1 1 1
1 1 0 0 0 1
1 0 1 1 0 1
1 0 0 0 0 1
1 1 1 1 0 1
1 0 0 0 0 0
*/
class Maze
{
public:
Maze(int c, int r) : col(c), row(r)
{
pMaze = new Node *[row];
for (size_t i = 0; i < row; ++i)
{
pMaze[i] = new Node[col];
}
path.resize(row * col);
dist.resize(row, vector<int>(col, INT_MAX));
}
// 析构函数:释放内存
~Maze()
{
for (size_t i = 0; i < row; i++)
{
delete[] pMaze[i];
}
delete[] pMaze;
}
void initNode(int x, int y, int val, int cost = 1)
{
pMaze[x][y].x = x;
pMaze[x][y].y = y;
pMaze[x][y].val = val;
pMaze[x][y].cost = cost;
}
void searchMazePath()
{
// 优先队列(小根堆)
priority_queue<Node, vector<Node>, Compare> q;
if (pMaze[0][0].val == 1)
{
return;
}
pMaze[0][0].cost = 0;
dist[0][0] = 0;
q.push(pMaze[0][0]);
// 四个方向偏移量,右、下、左、上
int dx[] = {1, 0, -1, 0};
int dy[] = {0, 1, 0, -1};
while (!q.empty())
{
Node top = q.top();
q.pop();
int x = top.x;
int y = top.y;
// 已经找到右下角,得到迷宫路径
if (x == row - 1 && y == col - 1)
{
return;
}
// 旧代价,跳过
if (dist[x][y] < top.cost)
{
continue;
}
for (int d = 0; d < WAY_NUM; d++)
{
int nx = x + dx[d];
int ny = y + dy[d];
if (nx < 0 || nx >= row || ny < 0 || ny >= col)
{
continue; // 越界
}
if (pMaze[nx][ny].val == 1)
{
continue; // 墙
}
// 新代价=当前代价+下一个节点的代价
int newCost = dist[x][y] + pMaze[nx][ny].cost;
if (newCost < dist[nx][ny])
{
dist[nx][ny] = newCost;
path[nx * row + ny] = top; // 记录节点的行走信息
q.push(pMaze[nx][ny]);
}
}
}
}
void showMazePath()
{
int x = row - 1;
int y = col - 1;
// 如果出口的前驱节点不存在 → 没路径
if (dist[x][y] == INT_MAX)
{
cout << "Dijkstra:找不到迷宫路径!" << endl;
return;
}
for (;;)
{
pMaze[x][y].val = '*';
if (x == 0 && y == 0)
{
break;
}
Node node = path[x * row + y];
x = node.x;
y = node.y;
}
for (size_t i = 0; i < row; ++i)
{
for (size_t j = 0; j < col; ++j)
{
if (pMaze[i][j].val == '*')
{
cout << "* ";
}
else
{
cout << pMaze[i][j].val << " ";
}
}
cout << endl;
}
}
private:
struct Node
{
int x;
int y;
int val; // 0=路 1=墙 * =路径
int cost; // 代价权重
};
struct Compare
{
bool operator()(const Node &a, const Node &b)
{
return a.cost > b.cost; // 小根堆
}
};
bool check(Node &node)
{
return node.x == row - 1 && node.y == col - 1;
}
int row;
int col;
Node **pMaze;
vector<vector<int>> dist; // 最小代价数组(Dijkstra核心)
vector<Node> path; // 记录bfs时,节点的行走信息
};
这里代码的核心逻辑在于:
- 用距离数组 dist 记录起点到每个点的最小代价
- 用优先队列(小根堆)priority_queue 每次选代价最小的点扩展
- 用前驱数组 path 记录路径(与 BFS 完全一样)
- 不能走回头路,只更新更短的路径
代码中,记录从起点到当前节点的代价变量是dist二维数组,它的起始值设置的是INT_MAX,这是一个技巧。
// 新代价=当前代价+下一个节点的代价
int newCost = dist[x][y] + pMaze[nx][ny].cost;
if (newCost < dist[nx][ny])
{
dist[nx][ny] = newCost;
path[nx * row + ny] = top; // 记录节点的行走信息
q.push(pMaze[nx][ny]);
}- dist[x][y]表示从起点走到当前节点x,y的最小真实代价。这是已经确定的最优解
- pMaze[nx][ny].cost是从当前节点,走到下一个节点nx,ny的代价。
- newCost是从起点->当前节点->下一个接地那的总代价,也是新路线的代价
- dist[nx][ny]是之前没有走过,或已经走过的从起点到下一个节点nx,ny的最小代价
- 当第一次到达nx和ny时,一定会更新,因为它是无穷大
- 如果之前通过其它路径到过nx和ny,如果当前的路线比这个代价更小,就更新为当前路径。
在DFS和BFS中,都需要判断State里面的方向来判断该方向是否能走。但在Dijkstra方法中,这些都以最小代价的方法来实现了。比如在BFS中,代码:
if (pMaze[x][y].state[RIGHT]) { ... }判断向右边的状态,是否能否。然后如果可以走,还需要设置state的状态回false,防止走回头路。但在Dijkstra中,判断能不能走只看2个条件:
- 是不是墙,即val==1的不能走。
- 新路径的代价是否更小,即newCost<dist[nx][ny]。
只要不是墙,且路径更优就能走。
另外,在DFS和BFS中,防止走回头路的策略是,探测完一个方向之后,将该方向以及探测的方向的反方向都设置为false,防止走回头路,比如:
pMaze[x][y].state[RIGHT] = false;
pMaze[x][y+1].state[LEFT] = false;但在Dijkstra中并不需要,原因有:
首先:dist数组自动拒绝更差的路径:
if (newCost < dist[nx][ny])如果走回头路,新代价一定会大于原来的代码,上述不等式不成立。
其次:小根堆能保证一个点被弹出,就永远得到了最小代价,不可能再次被更新。
最后:即使被重复入队,也会被下面这句过滤:
if (dist[x][y] < u.cost) continue;使用方法如下:
int main()
{
cout << "请输入迷宫的行列数,例如:10 10:";
int row, col, data;
cin >> row >> col;
Maze maze(row, col); //
cout << "请输入迷宫的路径信息(0表示可以走,1表示不能走)" << endl;
for (size_t i = 0; i < row; ++i)
{
for (size_t j = 0; j < col; ++j)
{
cin >> data;
if ( data == 1)
{
maze.initNode(i, j, data);//不能走,墙,权重为默认1
}
else
{
maze.initNode(i, j, 0, data);//可以走,否则权重为data
}
}
}
cout << "======================" << endl;
maze.searchMazePath();
maze.showMazePath();
cout << endl;
return 1;
}输出结果如下:
请输入迷宫的行列数,例如:10 10:6 6
请输入迷宫的路径信息(0表示可以走,1表示不能走)
0 0 1 1 1 1
1 0 0 0 0 1
1 0 1 1 0 1
1 0 0 0 0 1
1 0 1 1 1 1
1 0 0 0 0 0
======================
* * 1 1 1 1
1 * 0 0 0 1
1 * 1 1 0 1
1 * 0 0 0 1
1 * 1 1 1 1
1 * * * * *
请输入迷宫的行列数,例如:10 10:6 6
请输入迷宫的路径信息(0表示可以走,1表示不能走)
0 0 1 1 1 1
1 0 0 0 0 1
1 0 1 1 0 1
1 0 0 0 0 1
1 1 1 1 0 1
1 0 0 0 0 0
======================
* * 1 1 1 1
1 * 0 0 0 1
1 * 1 1 0 1
1 * * * * 1
1 1 1 1 * 1
1 0 0 0 * * 可以看到,这里的路径跟BFS是完全一样的。
当我把下面这条路径的权重变大,它就会自动跳回到上一条路径:
请输入迷宫的行列数,例如:10 10:6 6
请输入迷宫的路径信息(0表示可以走,1表示不能走)
0 0 1 1 1 1
1 0 0 0 0 1
1 0 1 1 0 1
1 0 3 0 0 1
1 1 1 1 0 1
1 0 0 0 0 0
======================
* * 1 1 1 1
1 * * * * 1
1 0 1 1 * 1
1 0 0 0 * 1
1 1 1 1 * 1
1 0 0 0 * * 五、A*算法
如前所述,Dijkstra算法可以看作是有权版本的BFS,他们有一些缺点:
- BFS和Dijkstra都是一层一层往外扩展搜索,类似水波纹,在很多搜索方向根本远离终点,浪费算力。
- 在大的迷宫里,Dijkstra要跑遍半个地图才能找到重点,搜索的范围大,效率低。
- Dijkstra只知道代价最小,他不知道目标终点的位置,没有“方向感”
为了解决Dijkstra算法的以上问题,A*算法应运而生,它既保留了最短路径的特性,又提高了搜索效率,它的做法是在原来的最小代价基础上,增加了启发函数(huristic fuction):
f(n) = g(n) + h(n)上述公式中:
- g(n):起点走到当前点的代价(= Dijkstra 的代价)
- h(n):当前点 预估 到终点的代价(启发函数,A* 核心)
- f(n):综合优先级,越小越优先走
在迷宫算法里,h(n)可以使用曼哈顿距离:
h = |x - endX| + |y - endY|就是“横向差+纵向差”,非常快。
代码实现如下:
#include <iostream>
#include <mutex>
#include <string>
#include <memory>
#include <queue>
#include <vector>
using namespace std;
const int WAY_NUM = 4;
// 四个方向偏移量,右、下、左、上
const int dx[] = {1, 0, -1, 0};
const int dy[] = {0, 1, 0, -1};
class Maze
{
public:
Maze(int c, int r) : col(c), row(r)
{
pMaze = new Node *[row];
for (size_t i = 0; i < row; ++i)
{
pMaze[i] = new Node[col];
}
dist.resize(row, vector<int>(col, INT_MAX));
path.resize(row, vector<Node>(col));
}
// 析构函数:释放内存
~Maze()
{
for (size_t i = 0; i < row; i++)
{
delete[] pMaze[i];
}
delete[] pMaze;
}
void initNode(int x, int y, int val, int cost = 1)
{
pMaze[x][y].x = x;
pMaze[x][y].y = y;
pMaze[x][y].val = val;
pMaze[x][y].cost = cost;
}
// 曼哈顿距离(A*核心启发函数)
int heuristic(int x, int y)
{
int ex = row - 1;
int ey = col - 1;
return abs(x - ex) + abs(y - ey);
}
void searchMazePath()
{
if (pMaze[0][0].val == 1)
{
return;
}
// 优先队列(小根堆)
priority_queue<Node, vector<Node>, Compare> q;
Node start = pMaze[0][0];
start.g = 0;
start.h = heuristic(0, 0);
start.f = start.g + start.h;
dist[0][0] = 0;
q.push(start);
while (!q.empty())
{
Node top = q.top();
q.pop();
int x = top.x;
int y = top.y;
// 已经找到右下角,得到迷宫路径
if (x == row - 1 && y == col - 1)
{
return;
}
// 旧代价,跳过
if (dist[x][y] < top.g)
{
continue;
}
for (int d = 0; d < WAY_NUM; d++)
{
int nx = x + dx[d];
int ny = y + dy[d];
if (nx < 0 || nx >= row || ny < 0 || ny >= col)
{
continue; // 越界
}
if (pMaze[nx][ny].val == 1)
{
continue; // 墙
}
// 新代价=当前代价+下一个节点的代价
int newG = dist[x][y] + pMaze[nx][ny].cost;
if (newG < dist[nx][ny])
{
dist[nx][ny] = newG;
path[nx][ny] = top; // 记录节点的行走信息
Node nextNode = pMaze[nx][ny];
nextNode.g = newG;
nextNode.h = heuristic(nx, ny);
nextNode.f = nextNode.g + nextNode.h;
q.push(nextNode);
}
}
}
}
void showMazePath()
{
int x = row - 1;
int y = col - 1;
// 如果出口的前驱节点不存在 → 没路径
if (dist[x][y] == INT_MAX)
{
cout << "Dijkstra:找不到迷宫路径!" << endl;
return;
}
for (;;)
{
pMaze[x][y].val = '*';
if (x == 0 && y == 0)
{
break;
}
Node node = path[x][y];
x = node.x;
y = node.y;
}
for (size_t i = 0; i < row; ++i)
{
for (size_t j = 0; j < col; ++j)
{
if (pMaze[i][j].val == '*')
{
cout << "* ";
}
else
{
cout << pMaze[i][j].val << " ";
}
}
cout << endl;
}
}
private:
struct Node
{
int x;
int y;
int val; // 0=路 1=墙 * =路径
int cost; // 代价(权重)
int g, h, f; // g:已走代价 h:预估代价 f:总优先级
Node(int x_, int y_, int val_, int cost_) : x(x_), y(y_), val(val_), cost(cost_) {}
Node() : x(-1), y(-1), val(0), g(0), h(0), f(0) {}
};
// 小根堆:f值最小优先
struct Compare
{
bool operator()(const Node &a, const Node &b)
{
return a.f > b.f;
}
};
bool check(Node &node)
{
return node.x == row - 1 && node.y == col - 1;
}
int row;
int col;
Node **pMaze;
vector<vector<int>> dist; // 最小代价数组(Dijkstra核心)
vector<vector<Node>> path; // 前驱节点
};使用方法如下:
int main()
{
cout << "请输入迷宫的行列数,例如:10 10:";
int row, col, data;
cin >> row >> col;
Maze maze(row, col); //
cout << "请输入迷宫的路径信息(0表示可以走,1表示不能走)" << endl;
for (size_t i = 0; i < row; ++i)
{
for (size_t j = 0; j < col; ++j)
{
cin >> data;
if (data == 1)
{
maze.initNode(i, j, data); // 不能走,墙,权重为默认1
}
else
{
maze.initNode(i, j, 0, data); // 可以走,否则权重为data
}
}
}
cout << "======================" << endl;
maze.searchMazePath();
maze.showMazePath();
cout << endl;
return 1;
}六、四种算法的可视化对比
前面已经分别少了DFS、BFS、Dijkstra以及A Start算法以及各自的特点,下面这个程序可以动态显示各种算法之间的区别:
#include <iostream>
#include <queue>
#include <stack>
#include <vector>
#include <tuple>
#include <climits>
#include <cmath>
#include <windows.h>
using namespace std;
const int dx[] = { 0, 1, 0, -1 };
const int dy[] = { 1, 0, -1, 0 };
#define COL_DEFAULT 7
#define COL_VISITED 11
#define COL_PATH 10
#define COL_SAND 6
#define COL_MUD 4
struct Node {
int x, y;
int val;
int cost;
bool visited;
bool isPath;
Node()
: x(-1), y(-1), val(1), cost(1), visited(false), isPath(false) {}
Node(int x_, int y_, int v_, int c_)
: x(x_), y(y_), val(v_), cost(c_), visited(false), isPath(false) {}
};
void setColor(int c) {
SetConsoleTextAttribute(GetStdHandle(STD_OUTPUT_HANDLE), c);
}
class Maze {
public:
int row, col;
Node** pMaze;
vector<vector<pair<int, int>>> prev;
Maze(int r, int c) : row(r), col(c) {
pMaze = new Node * [row];
for (int i = 0; i < row; ++i)
pMaze[i] = new Node[col];
prev.resize(row, vector<pair<int, int>>(col, { -1,-1 }));
}
~Maze() {
for (int i = 0; i < row; ++i) delete[] pMaze[i];
delete[] pMaze;
}
void setNode(int x, int y, int val, int cost) {
pMaze[x][y] = Node(x, y, val, cost);
}
void showTip() {
setColor(COL_DEFAULT);
cout << "图例:";
cout << "#=墙 ";
cout << "O=平地 ";
cout << "~=沙地 ";
cout << "=泥地 ";
setColor(COL_VISITED); cout << "蓝色=搜索过 ";
setColor(COL_PATH); cout << "绿色=最终路径\n";
setColor(COL_DEFAULT);
}
void draw(const string& title) {
system("cls");
cout << "===== " << title << " =====\n";
showTip();
for (int i = 0; i < row; ++i) {
for (int j = 0; j < col; ++j) {
char ch = '?';
int color = COL_DEFAULT;
if (pMaze[i][j].val == 1) {
ch = '#';
color = COL_DEFAULT;
} else {
// 平地用 O,无编译错误,显示清晰
if (pMaze[i][j].cost == 1)
ch = 'O';
else if (pMaze[i][j].cost == 3)
ch = '~';
else if (pMaze[i][j].cost == 5)
ch = '=';
if (pMaze[i][j].isPath) {
color = COL_PATH;
} else if (pMaze[i][j].visited) {
color = COL_VISITED;
} else {
if (pMaze[i][j].cost == 3)
color = COL_SAND;
else if (pMaze[i][j].cost == 5)
color = COL_MUD;
else
color = COL_DEFAULT;
}
}
setColor(color);
cout << ch << ' ';
}
cout << '\n';
}
setColor(COL_DEFAULT);
Sleep(25);
}
void reset() {
for (int i = 0; i < row; ++i) {
for (int j = 0; j < col; ++j) {
pMaze[i][j].visited = false;
pMaze[i][j].isPath = false;
prev[i][j] = { -1,-1 };
}
}
}
// DFS
bool dfs(int x, int y) {
if (x == row - 1 && y == col - 1) return true;
if (pMaze[x][y].val == 1 || pMaze[x][y].visited) return false;
pMaze[x][y].visited = true;
draw("DFS 搜索中");
for (int d = 0; d < 4; ++d) {
int nx = x + dx[d];
int ny = y + dy[d];
if (nx >= 0 && ny >= 0 && nx < row && ny < col) {
if (!pMaze[nx][ny].visited && pMaze[nx][ny].val == 0) {
prev[nx][ny] = { x, y };
if (dfs(nx, ny))
return true;
}
}
}
return false;
}
void dfsDrawPath() {
int x = row - 1, y = col - 1;
while (x != -1 && y != -1) {
pMaze[x][y].isPath = true;
auto p = prev[x][y];
x = p.first;
y = p.second;
}
draw("DFS 结果");
}
// BFS
void bfs() {
queue<pair<int, int>> q;
vector<vector<pair<int, int>>> prev(row, vector<pair<int, int>>(col, { -1,-1 }));
q.push({ 0,0 });
pMaze[0][0].visited = true;
while (!q.empty()) {
auto [x, y] = q.front(); q.pop();
draw("BFS 搜索中");
if (x == row - 1 && y == col - 1) break;
for (int d = 0; d < 4; ++d) {
int nx = x + dx[d];
int ny = y + dy[d];
if (nx >= 0 && ny >= 0 && nx < row && ny < col) {
if (!pMaze[nx][ny].visited && pMaze[nx][ny].val == 0) {
pMaze[nx][ny].visited = true;
prev[nx][ny] = { x,y };
q.push({ nx,ny });
}
}
}
}
int x = row - 1, y = col - 1;
while (x != -1) {
pMaze[x][y].isPath = true;
auto p = prev[x][y];
x = p.first; y = p.second;
}
draw("BFS 结果");
}
// Dijkstra
void dijkstra() {
using Tuple = tuple<int, int, int>;
priority_queue<Tuple, vector<Tuple>, greater<>> q;
vector<vector<int>> dist(row, vector<int>(col, INT_MAX));
vector<vector<pair<int, int>>> prev(row, vector<pair<int, int>>(col, { -1,-1 }));
dist[0][0] = 0;
q.emplace(0, 0, 0);
while (!q.empty()) {
auto [c, x, y] = q.top(); q.pop();
if (pMaze[x][y].visited) continue;
pMaze[x][y].visited = true;
draw("Dijkstra 搜索中");
if (x == row - 1 && y == col - 1) break;
for (int d = 0; d < 4; ++d) {
int nx = x + dx[d];
int ny = y + dy[d];
if (nx >= 0 && ny >= 0 && nx < row && ny < col && pMaze[nx][ny].val == 0) {
int newCost = c + pMaze[nx][ny].cost;
if (newCost < dist[nx][ny]) {
dist[nx][ny] = newCost;
prev[nx][ny] = { x,y };
q.emplace(newCost, nx, ny);
}
}
}
}
int x = row - 1, y = col - 1;
while (x != -1) {
pMaze[x][y].isPath = true;
auto p = prev[x][y];
x = p.first; y = p.second;
}
draw("Dijkstra 结果");
}
// A*
void astar() {
using Tuple = tuple<int, int, int, int>;
priority_queue<Tuple, vector<Tuple>, greater<>> q;
vector<vector<int>> dist(row, vector<int>(col, INT_MAX));
vector<vector<pair<int, int>>> prev(row, vector<pair<int, int>>(col, { -1,-1 }));
auto h = [&](int x, int y) {
return abs(x - (row - 1)) + abs(y - (col - 1));
};
dist[0][0] = 0;
q.emplace(h(0, 0), 0, 0, 0);
while (!q.empty()) {
auto [f, g, x, y] = q.top(); q.pop();
if (pMaze[x][y].visited) continue;
pMaze[x][y].visited = true;
draw("A* 搜索中");
if (x == row - 1 && y == col - 1) break;
for (int d = 0; d < 4; ++d) {
int nx = x + dx[d];
int ny = y + dy[d];
if (nx >= 0 && ny >= 0 && nx < row && ny < col && pMaze[nx][ny].val == 0) {
int newG = g + pMaze[nx][ny].cost;
if (newG < dist[nx][ny]) {
dist[nx][ny] = newG;
prev[nx][ny] = { x,y };
q.emplace(newG + h(nx, ny), newG, nx, ny);
}
}
}
}
int x = row - 1, y = col - 1;
while (x != -1) {
pMaze[x][y].isPath = true;
auto p = prev[x][y];
x = p.first; y = p.second;
}
draw("A* 结果");
}
};
int map[16][16] = {
{0,0,1,1,1,1,1,1,1,1,1,1,1,1,1,1},
{1,0,0,0,0,0,0,0,2,2,0,0,0,0,0,1},
{1,0,1,1,1,1,0,1,3,3,0,1,1,1,0,1},
{1,0,1,0,0,0,0,1,3,3,0,0,0,1,0,1},
{1,0,1,0,1,1,1,1,0,0,1,1,0,1,0,1},
{1,0,1,0,1,0,0,0,0,1,0,0,0,1,0,1},
{1,0,1,0,1,0,1,1,1,1,1,1,0,1,0,1},
{1,0,0,0,1,0,0,0,0,0,0,1,0,0,0,1},
{1,1,1,0,1,1,1,1,1,1,0,1,0,1,1,1},
{1,0,0,0,0,0,0,0,0,1,0,0,0,0,0,1},
{1,0,1,1,1,1,1,1,0,1,1,1,1,1,0,1},
{1,0,0,0,0,0,0,1,0,0,0,0,0,0,0,1},
{1,1,1,1,1,1,0,1,1,1,1,1,1,1,0,1},
{1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1},
{1,0,1,1,1,1,1,1,1,1,1,1,1,1,0,0},
{1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,0},
};
int main() {
Maze maze(16, 16);
for (int i = 0; i < 16; ++i) {
for (int j = 0; j < 16; ++j) {
if (map[i][j] == 1)
maze.setNode(i, j, 1, 0);
else if (map[i][j] == 2)
maze.setNode(i, j, 0, 3);
else if (map[i][j] == 3)
maze.setNode(i, j, 0, 5);
else
maze.setNode(i, j, 0, 1);
}
}
cout << "16×16 迷宫寻路对比\n";
cout << "依次演示:DFS → BFS → Dijkstra → A*\n按回车开始...";
cin.get();
maze.reset();
maze.dfs(0, 0);
maze.dfsDrawPath();
cout << "\nDFS 结束,回车继续 BFS..."; cin.get();
maze.reset();
maze.bfs();
cout << "\nBFS 结束,回车继续 Dijkstra..."; cin.get();
maze.reset();
maze.dijkstra();
cout << "\nDijkstra 结束,回车继续 A*..."; cin.get();
maze.reset();
maze.astar();
cout << "\n全部演示完成!\n";
return 0;
}
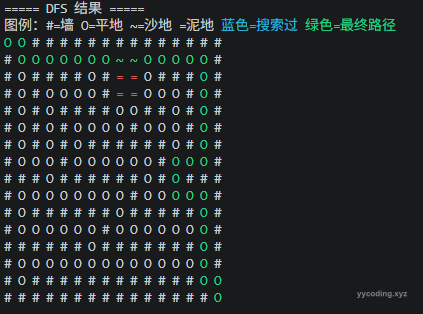
下面这个是DFS的输出结果:
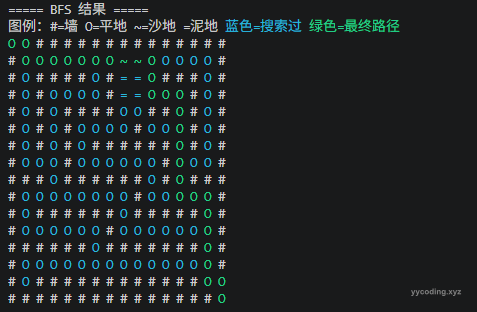
BFS的结果:
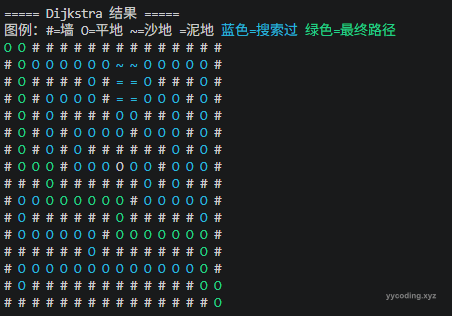
Dijkstra的结果:
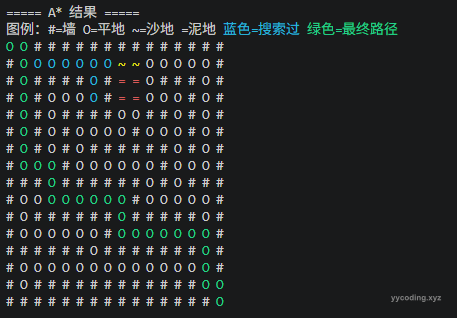
A Star的结果:
下面是对这几种算法的简单比较:
